
27th of April 2006
Ant-Weight Robot
I binned my old digital camera the other day as I never use it and the thing is older than a really old thing. I bought it while I was still in secondary school and it was cheap even back then. Before I binned it, though, I had the good sense to remove the flash card from it. Turns out that the flash card reader on my laptop can't handle it as it's too old, but the printer's flash card reader still has a slot which is perfect for it. So I just plugged it in today and loaded the pictures off it to see what was on there.
Well what a pleasant surprise: a load of old pictures of an ant-weight robot (sort of) that I built years ago for a bit of fun. I think it would have been either at the end of my first or the end of my second year that I built it. I remember taking the picturs, but thought I'd lost them all forever, but there they are!
 This is an image of the Ant from the side. It was a very simple construction, made from bits of old radio controlled car kit. The two large wheels were from an old Meccanno set I have, and were attached to the servos using medium length wood-screws.
This is an image of the Ant from the side. It was a very simple construction, made from bits of old radio controlled car kit. The two large wheels were from an old Meccanno set I have, and were attached to the servos using medium length wood-screws.
As can clearly be seen here, there was no "body" on the 'bot as such, just two pieces of bent card which kept the machine the right way up. Sticking out the top can be seen a wire which is, by the looks of it, one of the servo leads.
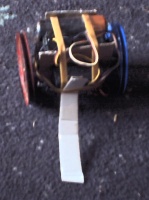
 In this image the battery is more obvious and, if you look closely, you'll be able to make out the radio receiver box at the very front of the robot, underneath the two elastic bands. The front piece of bent cardboard, which was very important to the construction, can be clearly seen. This piece of cardboard prevented the 'bot from tipping forward when decellerating or reversing.
In this image the battery is more obvious and, if you look closely, you'll be able to make out the radio receiver box at the very front of the robot, underneath the two elastic bands. The front piece of bent cardboard, which was very important to the construction, can be clearly seen. This piece of cardboard prevented the 'bot from tipping forward when decellerating or reversing.
The battery, seen at the back of the robot was a standard 4.5 volt lantern battery which powered everything, as I recall.
{kind=link}
 The two servos were operated independently and each was on its own radio channel meaning that they were controlled completely independently by the driver (ie me). It meant the 'bot could go forwards, backwards, left and right or even spin on the spot. Albeit rather slowly. I'd love to say "but what it lacked in speed it made up for in power", but I'd be lying. It may have managed a bit of power if those wheels had had some rubber on them, but we'll never know.
The two servos were operated independently and each was on its own radio channel meaning that they were controlled completely independently by the driver (ie me). It meant the 'bot could go forwards, backwards, left and right or even spin on the spot. Albeit rather slowly. I'd love to say "but what it lacked in speed it made up for in power", but I'd be lying. It may have managed a bit of power if those wheels had had some rubber on them, but we'll never know.
The servos presented one of the biggest challenges in creating the ant, as servos are designed for controlling other devices; not driving things around. Therefore they have a limited degree of rotation and are full of controllers which allow the servo to know how far away from its central position it is.
 But of course, I wanted the servos to do one thing: spin when I tell them to and stop when I tell them to.
But of course, I wanted the servos to do one thing: spin when I tell them to and stop when I tell them to.
This meant dismantling the servos and taking a knife to the gears inside. I had to strip a bit of plastic off the main spur gear which, if left in place, would have meant the gear could not have made a full rotation. Then I had to use a drill-bit to strip away some plastic on the inside of the gear (where it rotated). The purpose of this was to disable the mechanism that allowed the servo to know how far it had rotated and therefore did not stop rotating.
The servos were then blue-tac'ed together (I kid not) and then the radio receiver was held on to those by way of the two rubber bands in the picture, as was the battery. And possibly some more blue-tac.
As a first go, and as a very quick bodge-job, I personally think it wasn't bad. Sure it wasn't going to win any combats, but then I didn't build it to fight it. I built it to see how it's done. Building actual combat robots is an expensive hobby, and one I don't (currently) have the money to take up. But maybe, just maybe, one day...